Signals and Systems
Miscellaneous
Marks 21
GATE EE 2007
MCQ (Single Correct Answer)
+2
-0.6
Consider the discrete-time system shown in the figure where the impulse response of $$G\left( z \right)$$ is
$$g\left( 0 \right) = 0,\,\,g\left( 1 \right) = g\left( 2 \right) = 1,\,g\left( 3 \right) = g\left( 4 \right) = .... = 0$$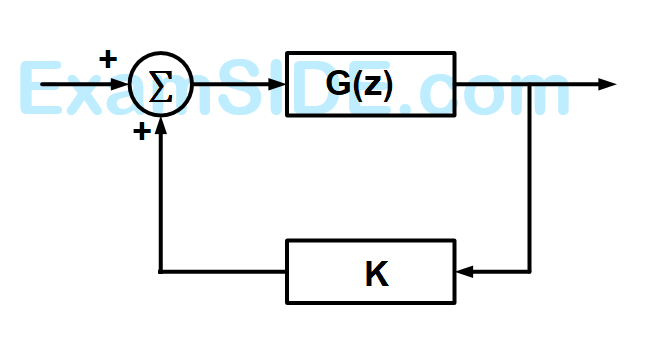
$$g\left( 0 \right) = 0,\,\,g\left( 1 \right) = g\left( 2 \right) = 1,\,g\left( 3 \right) = g\left( 4 \right) = .... = 0$$
This system is stable for range of values of $$K$$
2
GATE EE 2007
MCQ (Single Correct Answer)
+2
-0.6
A signal is processed by a causal filter with transfer function $$G(s).$$ For a distortion free output signal waveform, $$G(s)$$ must.
$$G\left( z \right) = a{z^{ - 1}} + \beta \,\,{z^{ - 3}}$$ is a low-pass digital filter with a phase characteristic same as that of the above question if
3
GATE EE 2006
MCQ (Single Correct Answer)
+2
-0.6
$$x\left[ n \right] = 0;\,n < - 1,\,n > 0,\,x\left[ { - 1} \right] = - 1,\,x\left[ 0 \right]$$
$$\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\, = 2$$ is the input and
$$y\left[ n \right] = 0;\,n < - 1,\,n > 2,\,y\left[ { - 1} \right] = - 1,\, = y\left[ 1 \right],\,y\left[ 0 \right] = 3,\,y\left[ 2 \right]$$
$$\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\, =- 2$$ is the output of a discrete-time $$LTI$$ system. The system impulse response $$h\left[ n \right]$$ will be
$$\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\, = 2$$ is the input and
$$y\left[ n \right] = 0;\,n < - 1,\,n > 2,\,y\left[ { - 1} \right] = - 1,\, = y\left[ 1 \right],\,y\left[ 0 \right] = 3,\,y\left[ 2 \right]$$
$$\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\, =- 2$$ is the output of a discrete-time $$LTI$$ system. The system impulse response $$h\left[ n \right]$$ will be
4
GATE EE 2006
MCQ (Single Correct Answer)
+2
-0.6
A continuous-time system is described by $$y\left( t \right) = {e^{ - |x\left( t \right)|}},$$ where $$y(t)$$ is the output and $$x(t)$$ is the input. $$y(t)$$ is bounded
GATE EE Subjects
Electromagnetic Fields
Signals and Systems
Engineering Mathematics
General Aptitude
Power Electronics
Power System Analysis
Analog Electronics
Control Systems
Digital Electronics
Electrical Machines
Electric Circuits
Electrical and Electronics Measurement