Control Systems
1
GATE EE 2025
Numerical
+2
-0
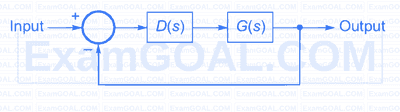
A controller $D(s)$ of the form $\left(1+K_D s\right)$ is to be designed for the plant $G(s)=\frac{1000 \sqrt{2}}{s(s+10)^2}$ as shown in the figure. The value of $K_D$ that yields a phase margin of $45^{\circ}$ at the gain cross-over frequency of $10 \mathrm{rad} / \mathrm{sec}$ is _________(round off to one decimal place).
Your input ____
2
GATE EE 2012
MCQ (Single Correct Answer)
+2
-0.6
The transfer function of a compensator is given as $${G_c}\left( s \right) = {{s + a} \over {s + b}}$$
$${G_c}\left( s \right)$$ is a lead compensator if
3
GATE EE 2012
MCQ (Single Correct Answer)
+2
-0.6
The transfer function of a compensator is given as $${G_c}\left( s \right) = {{s + a} \over {s + b}}$$
The phase of the above lead compensator is maximum at
4
GATE EE 2008
MCQ (Single Correct Answer)
+2
-0.6
The transfer function of two compensators are given below:
$${C_1} = {{10\left( {s + 1} \right)} \over {\left( {s + 10} \right)}},\,{C_2} = {{s + 10} \over {10\left( {s + 1} \right)}}$$
Which one of the following statements is correct?
Questions Asked from Marks 2
GATE EE Subjects
Electromagnetic Fields
Signals and Systems
Engineering Mathematics
General Aptitude
Power Electronics
Power System Analysis
Analog Electronics
Control Systems
Digital Electronics
Electrical Machines
Electric Circuits
Electrical and Electronics Measurement