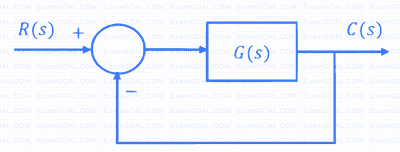
The open-loop transfer function of the system shown in the figure, is
$$ G(s)=\frac{K s(s+2)}{(s+5)(s+7)} $$
For $K \geq 0$, which of the following real axis point(s) is/are on the rool locus?


The closed loop transfer function of the system is

Consider the closed-loop system shown in the figure with $$G(s) = \frac{K(s^2 - 2s + 2)}{(s^2 + 2s + 5)}.$$ The root locus for the closed-loop system is to be drawn for $0 \leq K < \infty$. The angle of departure (between $0^{o}$ and $360^{o})$ of the root locus branch drawn from the pole $(−1 + j2)$, in degrees, is _________________ (rounded off to the nearest integer).
For a unity feedback system, the breakaway point of the root loci on the real axis occurs at,
Which of the following statements is true?
Its root locus plot against $$K$$ is
(a) Draw a rough sketch of the root locus plot; given that the complex roots ofthe characteristic equation move along a circle.
(b) As K increases, does the system become less stable? Justify your answer.
(c) Find the value of $$K$$ (if it exists) so that the damping $$\xi $$ of the complex closed loop poles is $$0.3.$$
(a) Determine the range of $$K$$ for stable operation
(b) Determine the imaginary axis crossover points
(c) Without calculating the real axis break - away points, sketch the form of root loci for the system.